Co-founder
Dec 2025 — May 2026 · Stanford, CA
Teleoperation for multi-robot fleets
One operator, many robots. VR, haptic, and joystick control with stereo and wrist cameras, monitoring, and remote intervention.
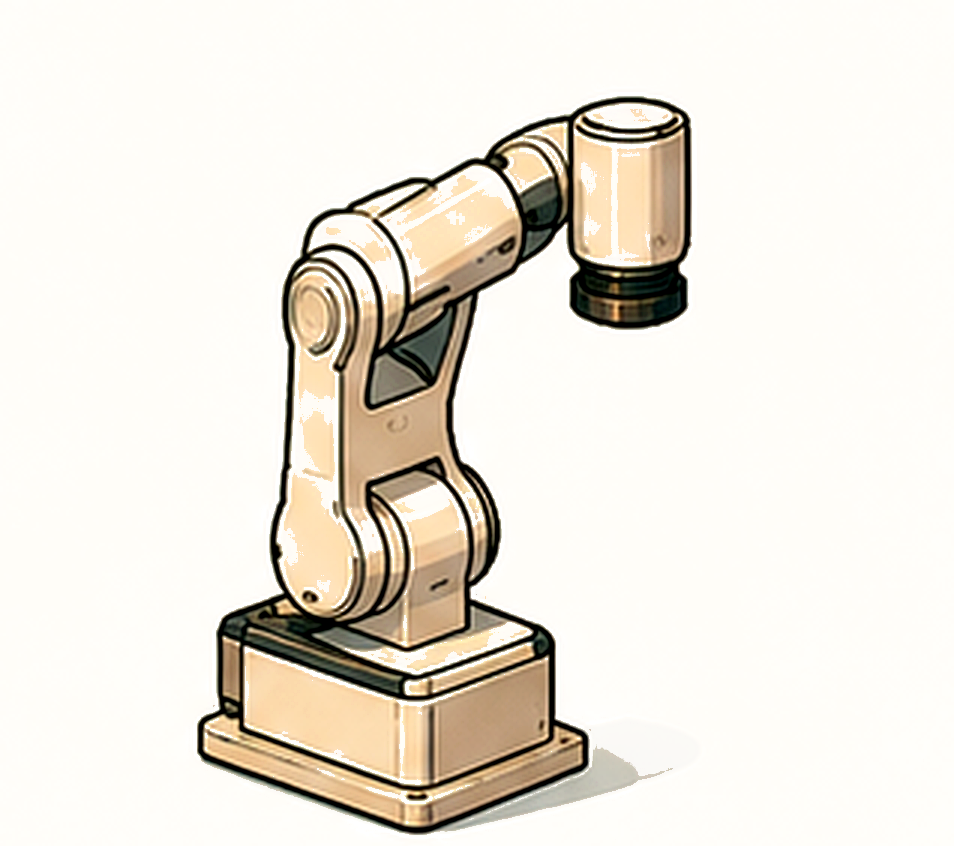
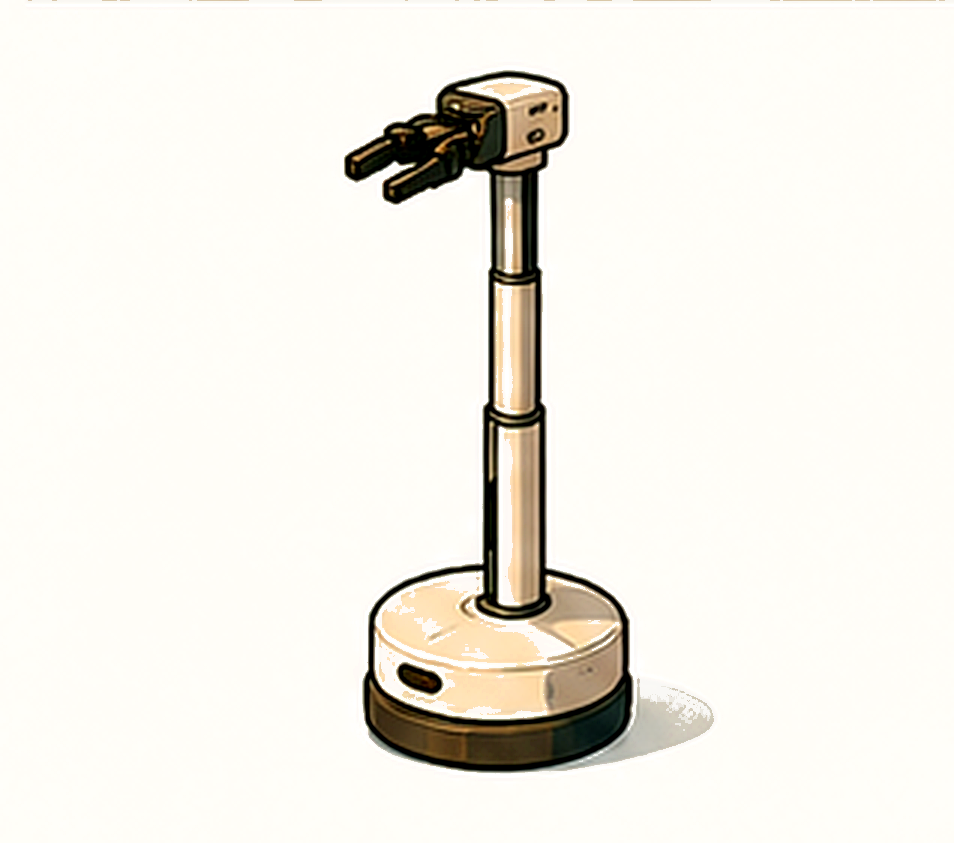
- Multi-robot teleop — Kinova G3, Franka Emika, Hello Robot Stretch, AgileX Piper, Lite6
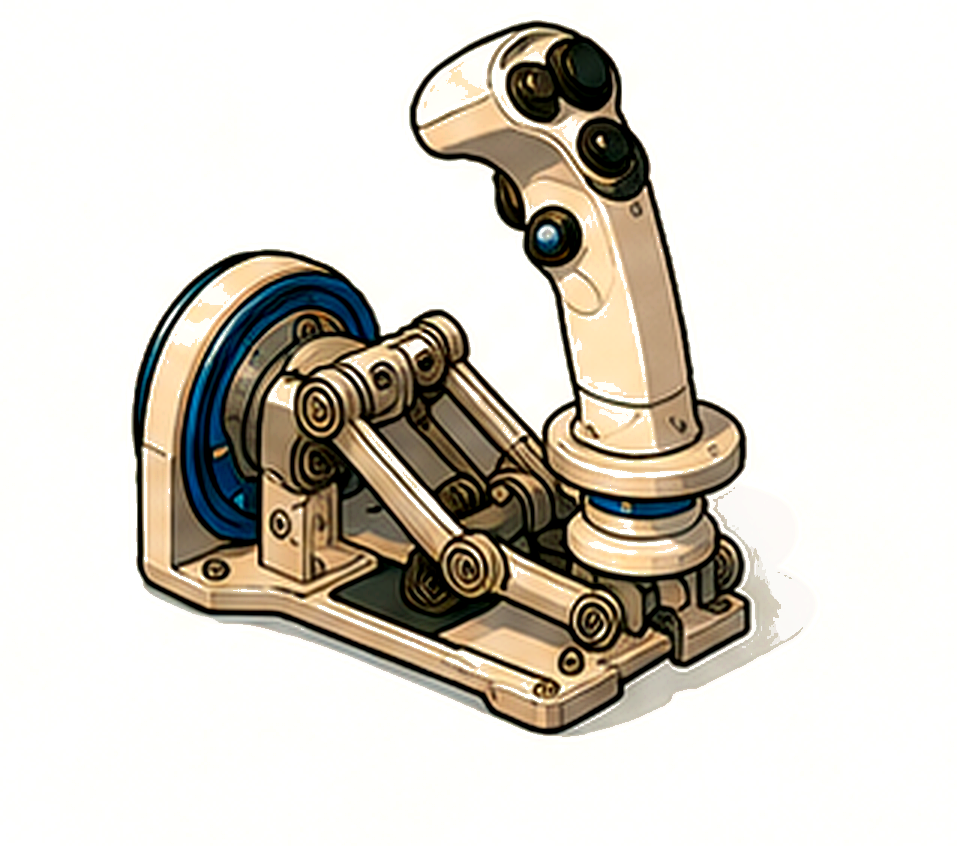
- Input modalities — VR (Quest 3), haptic (Force Dynamics Omega), joystick; stereo + wrist cameras
- Operations — monitoring, remote intervention, data logging, search & retrieval
- Production-ready — RBAC, admin controls, security; MuJoCo sim for operator training
- Live cross-continental teleop — Stanford Robotics Center ↔ Bengaluru